对于梯度相信大家都不陌生,咱们经常把它翻译成导数。那么咱们就先来看看在梯度下降中导数是怎么起到作用的。
导数
一阶导数十分好理解,一阶导数是表示原函数的一个斜率信息,而二阶导数是告诉我们一阶导数随着输入是如何变化的,可以认为二阶导数是对曲率的衡量。如果这样的函数具有零二阶导数,那就没有曲率,也就是一条完全平坦的线,仅用梯度就可以预测它的值。也就是是当学习率是α的时候,每次沿着梯度负方向移动α的时候,代价函数也移动α。但是如果二阶导数是负数的时候,函数曲线向下凹陷(向上凸出),因此代价函数将下降得比α下降的多,如果二阶导数是正的,函数 曲线是向上凹陷(向下凸出),因此代价函数将下降得比α移动的少。
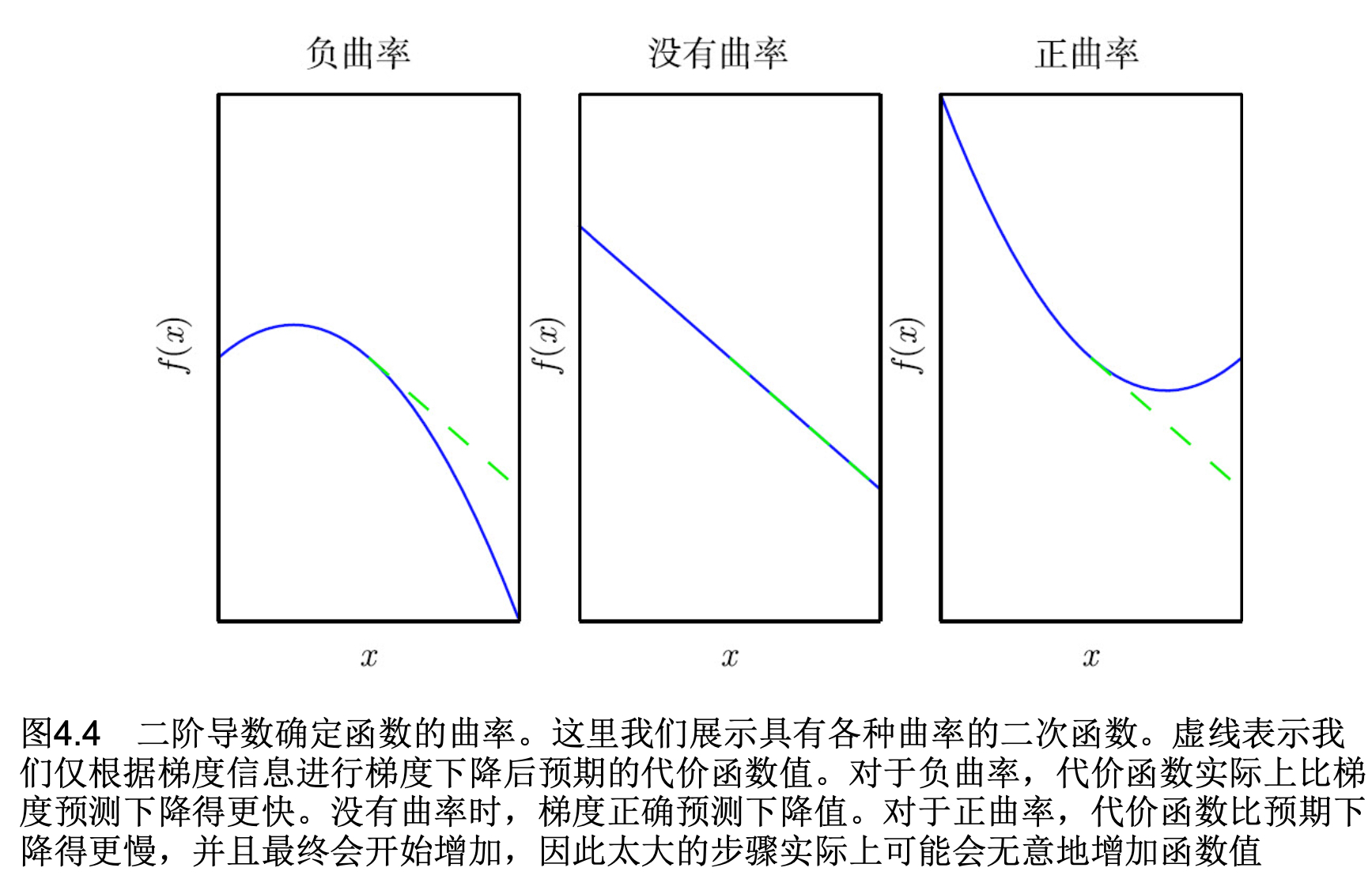
通过上面这个图能够看的十分清楚,梯度与曲率的关系。其实二阶导数表达的是每次梯度下降对损失函数变化的预期。
Hessian 矩阵
当我们的函数具有多维输入时,二阶导数也有很多。我们可以将这些导数合并成一个矩阵,称为Hessian矩阵。
H(f)(x)i,j=∂xi∂xj∂2f(x)
微分算子在任何二阶偏导连续的点处可交换,也就是它们的顺序可以互换.也就是说Hessian矩阵是一个对称矩阵。因为Hessian矩阵是实对称的,我们可以将其分解成一组实特征值和一组特征矢量的正交基。在特定方向d上的二阶导数可以写成dTHd.用到下面的泰勒展开中。
我们可以通过(方向)二阶导数预期一个梯度下降步骤能表现得多好。看下面这个推导过程。当前点x0处的函数f(x)的二阶泰勒展开如下
f(x)=f(x0)+(x−x0)Tg+21(x−x0)TH(x−x0)
其中g是梯度,H是x0点的Hessian。如果使用学习率α,那么新的点x将会是x0−αg。
f(x0−αg)=f(x0)−αgTg+21αgTHg
其中上面的三项分别是,函数原始值,函数斜率导致的预期改善和函数曲率导致的矫正。这里有个比较有意思的事情,当最后一项太大的的时候,梯度下降是可能向上移动的。当gTHg为0或者为负数的时候,使用α将会永远让f下降。在实际中,泰勒级数不会在α大的时候也保持准确,因此这种情况下就要采用启发式的选择(蒙)。当gTHg为正的时候,最优步长为
α=gTHggTg
最坏的情况下,g和H的最大特征值λmax对应的特征矢量对齐,则最优步长是λmax1,当我们要最小化的函数能用二次函数很好地近似的情况下,Hessian的特征值决定了学习率的量级。
进阶
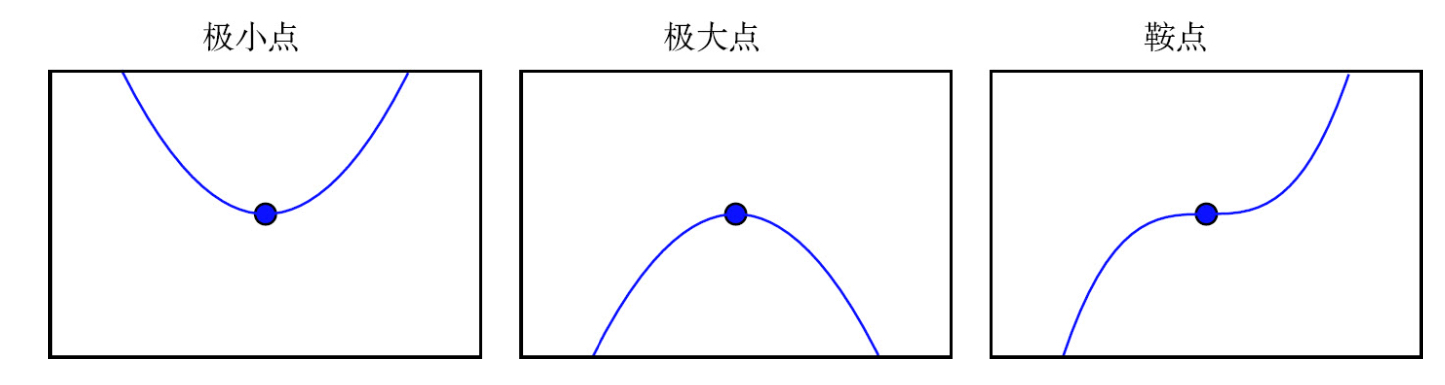
二阶导数还可以用于确定一个临界点是否是局部极大点、全局极小点或鞍点。回想一下当f’(x)=0, f’‘(x)>0的时候,意味着f’(x)会随着我们移向右边而增加,移向左边而减小。也就是f′(x−α)<0,f′(x+α)>0。换句话说,当我们移向右边,斜率开始指向右边的上坡;当我们移向左边,斜率开始指向左边的上坡。那么咱们能够得出如下的结论,当f’(x)=0, f’‘(x)>0的时候,x是一个全局 极小点。当f’(x)=0, f’‘(x)<0的时候,x是一个局部极大点。这就是所谓的二阶导数测试 (second derivative test),但是当 f’'(x)=0的时候,测试是不确定的,这种情况下x可以是一个鞍点或平坦区域的一部分。
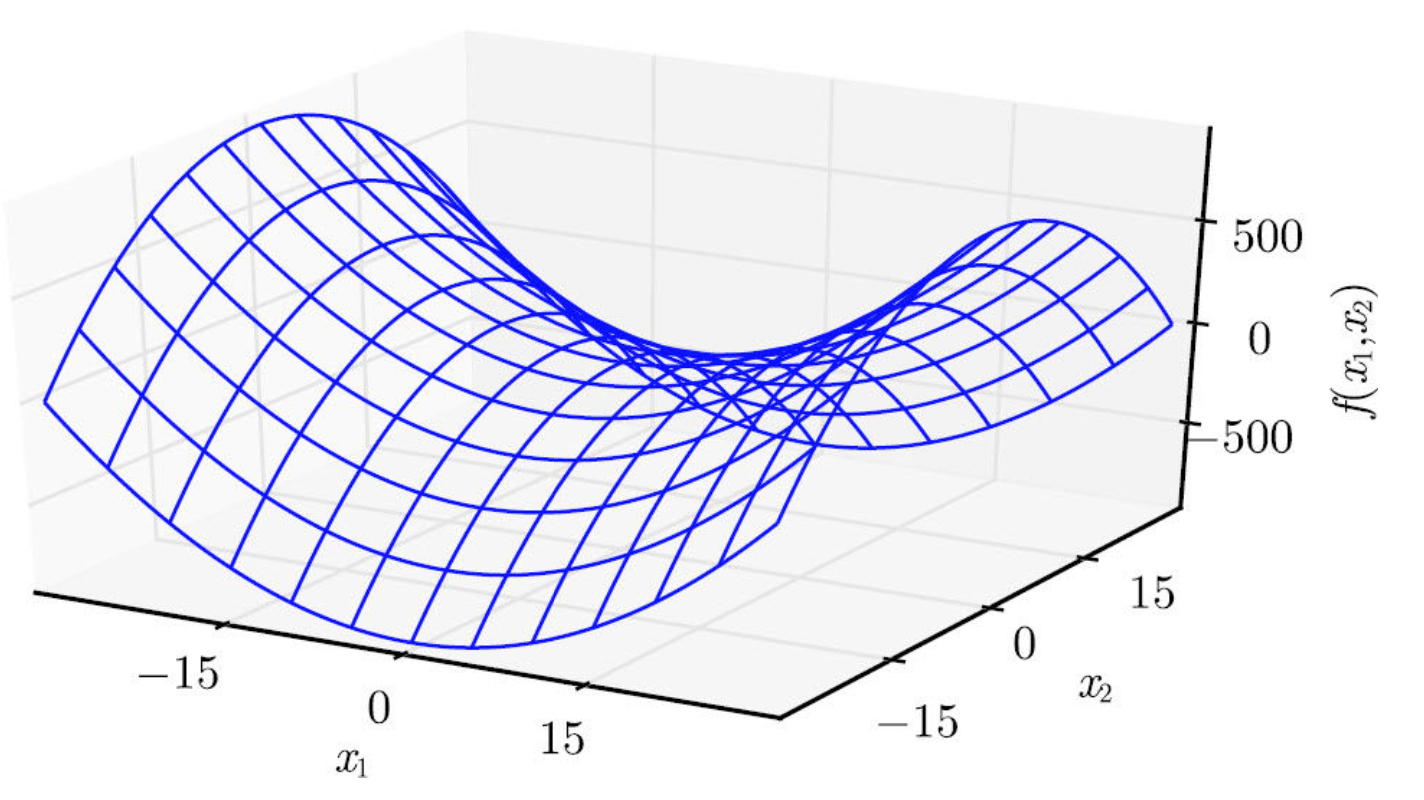
当Hessian是正 定的(所有特征值都是正的),则该临界点是全局极小点。因为方 向二阶导数在任意方向都是正的。同样的,当Hessian是负定的(所有特征值都是负的),这个点就是局部极大点。在多维情况下,实际上我们可以找到确定该点是否为鞍点的积极迹象(某些情况下)。如果Hessian的特征值中至少一个是正的且至少一个是负的,那么 x 是f某个横截面的局部极大点,却是另一个横截面的全局极小点,如下图表达是函数f(x)=x12−x22。
仅使用梯度信息的优化算法称为 (first-order optimization algorithms),如梯度下降。使用Hessian矩阵的优化 算法称为 (second-order optimization algo- rithms)(Nocedal and Wright,2006),如牛顿法。