基于值的深度强化算法
上篇文章咱们介绍了Qlearning,这个时候正好我们就机会来详细看看DQN的学习方式,同样的之前的章节中我们介绍了DQN的原理,但是没有一个特别好的例子,本节咱们就来补上这一块。
DQN的使用场景就是我们发现使用Qlearning能够在离散状态空间下解决任何强化学习问题,但是如果状态空间是无限的或者是连续的怎么办呢? DQN的核心思路是将原有的离散状态空间表示为一个函数f。
f(s,a)=Q(s,a)
这也就是知道了,我们思想通过学习的方式构建状态动作空间和值函数的映射关系,思路简单粗暴。这个时候又浮现出另一个问题,既然是通过训练,那么标签是什么?这个就要感谢我们之前学习了Q-Learning 的知识。我们称为经验池。怎么来构造这个标签呢?实际上是通过Q-Learning使用reward来构造标签。这里就引入了经验池的概念。
经验池
已知一个状态st ,通过 Q网络 得到各种动作的Q值,然后用σ贪婪策略 选择动作at (σ贪婪策略是为了保证一定的探索,大概率会选择Q值最大的那个动作),然后将 at 输入到环境中(真实的强化环境),得到 st+1 和 rt+1 ,这样就得到一个experience: st,at,st+1,rt+1 ,然后将experience放入经验池中。构建好这个大的经验池,后续我们就是通过随机的抽取学习就好了。
这里需要回答一个问题是,为什么要使用经验池。
神经网络进行训练时,假设样本是独立同分布的。而通过强化学习采集到的数据之间存在着关联性,利用这些数据进行顺序训练,神经网络当然不稳定。
经验回放通过随机抽取,可以打破数据间的关联。
DQN
拿到了上面的经验池,怎么来使用呢?我们先来看下面这个网络结构,Nature DQN使用了两个Q网络,一个当前Q网络𝑄用来选择动作,更新模型参数,另一个目标Q网络𝑄′用于计算目标Q值。目标Q网络的网络参数不需要迭代更新,而是每隔一段时间从当前Q网络𝑄复制过来,即延时更新,这样可以减少目标Q值和当前的Q值相关性。然后解释一下这个网络是如何学习和更新的.
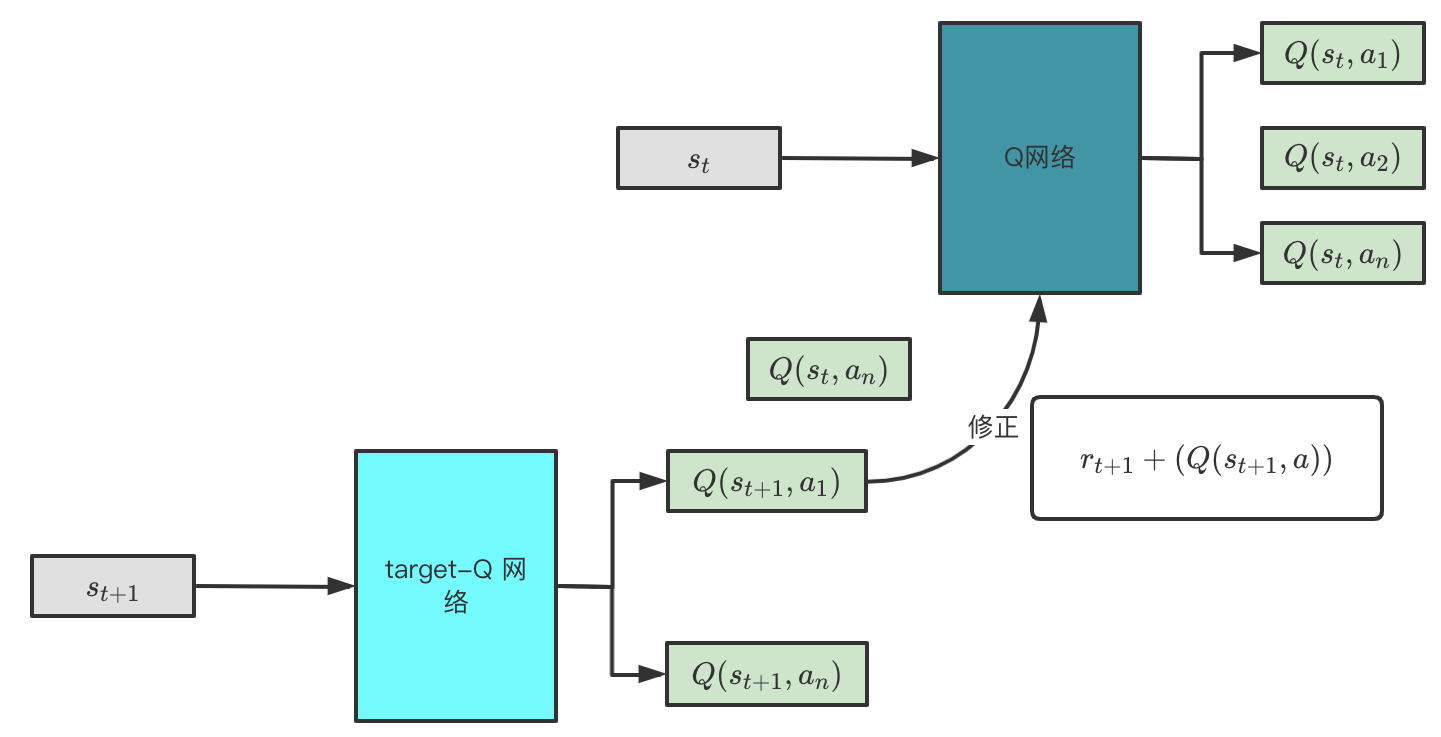
首先根据st和at通过Q网络计算出Q(st,at)的值,这里假设at=a1,然后将下一状态st+1输入到target-Q网络,得到不同动作的Q值,然后选择最大的Q值确定动作a2,然后以Q(st,a1)作为预测值,而rt+1+Q(st+1,a2)作为实际值进行反向传播,这里和监督学习就一样啦。过一段时间后,将Q网络中的参数硬拷贝到Target Q网络中。这样我们就完成一个DQN的学习,整个过程还是挺复杂的。
import numpy as np
import random
from collections import deque
import torch
import torch.nn as nn
import torch.optim as optim
class DQN(nn.Module):
def __init__(self, state_dim, action_dim):
super(DQN, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, 128)
self.fc3 = nn.Linear(128, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
return self.fc3(x)
class DQNAgent:
def __init__(self, state_dim, action_dim, lr=0.001, gamma=0.99, epsilon=1.0, epsilon_min=0.01, epsilon_decay=0.995, target_update_freq=100):
self.state_dim = state_dim
self.action_dim = action_dim
self.gamma = gamma
self.epsilon = epsilon
self.epsilon_min = epsilon_min
self.epsilon_decay = epsilon_decay
self.target_update_freq = target_update_freq
self.steps = 0
# 主网络
self.model = DQN(state_dim, action_dim)
self.optimizer = optim.Adam(self.model.parameters(), lr=lr)
self.criterion = nn.MSELoss()
# 目标网络
self.target_model = DQN(state_dim, action_dim)
self.target_model.load_state_dict(self.model.state_dict())
self.replay_buffer = deque(maxlen=10000)
def select_action(self, state):
if random.random() < self.epsilon:
return random.randint(0, self.action_dim - 1) # 随机动作
else:
with torch.no_grad():
state_tensor = torch.FloatTensor(state).unsqueeze(0)
q_values = self.model(state_tensor)
return q_values.argmax().item() # 选择 Q 值最大的动作
def train(self, batch_size):
if len(self.replay_buffer) < batch_size:
return
batch = random.sample(self.replay_buffer, batch_size)
states, actions, rewards, next_states, dones = zip(*batch)
states = torch.FloatTensor(np.array(states))
actions = torch.LongTensor(actions)
rewards = torch.FloatTensor(rewards)
next_states = torch.FloatTensor(np.array(next_states))
dones = torch.FloatTensor(dones)
# 计算当前 Q 值
current_q = self.model(states).gather(1, actions.unsqueeze(-1))
# 计算目标 Q 值
with torch.no_grad():
next_q = self.target_model(next_states).max(1)[0]
target_q = rewards + (1 - dones) * self.gamma * next_q
# 计算损失并更新主网络
loss = self.criterion(current_q.squeeze(), target_q)
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
# 更新目标网络
self.steps += 1
if self.steps % self.target_update_freq == 0:
self.target_model.load_state_dict(self.model.state_dict())
# 衰减 ε
self.epsilon = max(self.epsilon_min, self.epsilon * self.epsilon_decay)
def save_experience(self, state, action, reward, next_state, done):
self.replay_buffer.append((state, action, reward, next_state, done))
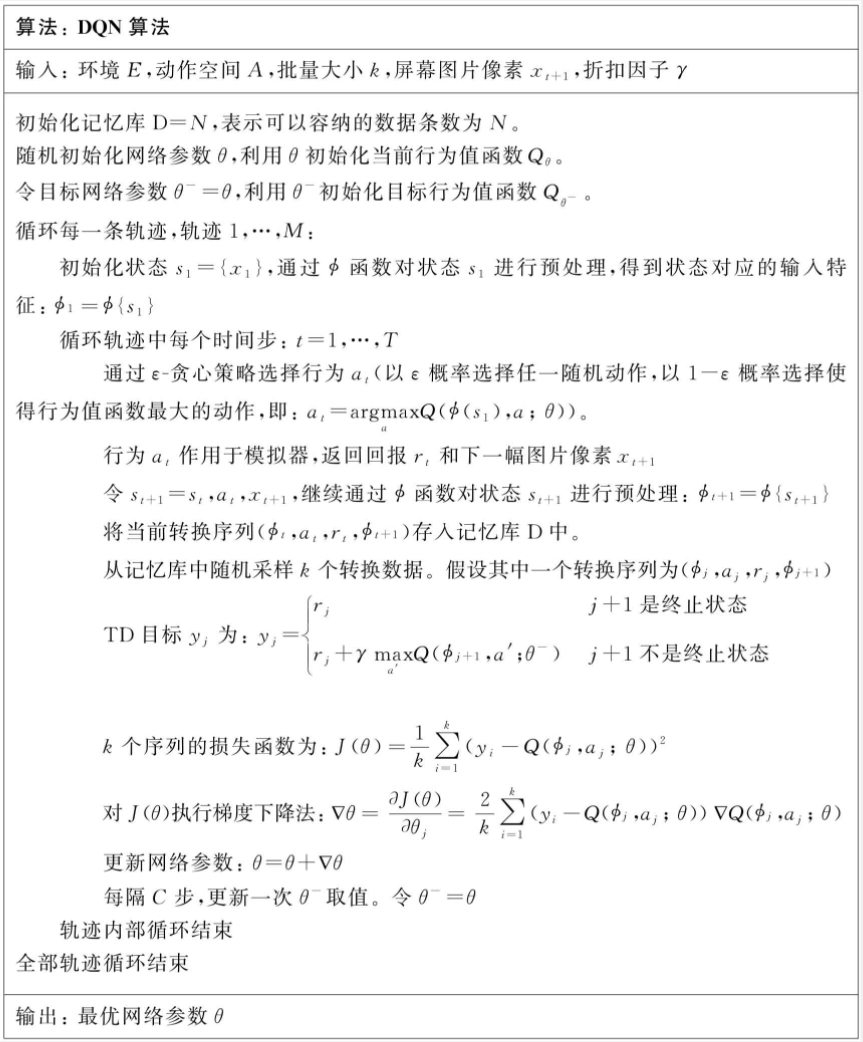
上文给出了DQN的python实现。通过和环境进行交互,获得缓冲池,然后进行训练。
过往的研究表明,使用非线性网络表示值函数时出现不稳定等问题。所以这里我们要使用两个网络来学习以保证稳定性。 基于这样的时候还有好几种类似的学习方式,本节就不一一介绍了,后续有精力咱们再来整理一下这类神经网络的改进点都是什么。
Double DQN
传统的Qlearning和DQN都存在一个问题就是值函数估计过大的问题,且动作空间越大,误差越大,这与算法本身采用Max动作造成的。如果这种过估计是均匀的,那么不会影响到我们的最优策略,但是实际中往往是非均匀分布的,所以会造成比较大的误差。
在传统的DQN中,求TD目标的时候,往往是选取一个动作a∗,满足如下表达式。
a∗=argmax Q(St+1,a;θt)
评估使用的是
YDQN=Rt+1+r∗max Q(St+1,a;θt)
可见传统的DQN不管是选择action还是评估action都是采用的一套参数θt.
而DDQN采用的是不同的值函数和评估函数,使用上文提到的DQN网络,使用主网络进行动作选择,使用另一个网络进行动作评估。算法流程如下。可以看出与原始的DQN唯一的不同就是。不再是直接在目标Q网络里面找各个动作中最大Q值,而是先在当前Q网络中先找出最大Q值对应的动作。然后利用这个选择出来的动作在目标网络里面去计算目标Q值。可以仔细看到下面的伪代码中对于y的定义的变化。

从上面的总结来看双Q网络的核心思想是将选择和评估分开。在双Q学习中有两套值函数,每次学习经历都随机放到其中一个值函数进行更新,这样就出现了两套参数θ和θ′,那么每次更新的时候,其中一组用来决定贪心策略,另一组用来确定值。ß