本章主要讲解一下在连续特征值的情况下如何进行因果图的挖掘。之前的介绍中节点的属性大部分以是否值为主。
之前讲的优化的框架是如下的公式表达。
max F(A)s.t.G(A)∈DAGs(1.1)
F(A)表示图的打分, A 为因果结构的邻接矩阵,G(A)为A 所对应的有向无环图,DAGS 是所有可能的DAG组成的离散空间.公式1.1能够在低维做一个优化,并且取得比较好的结果,但是本身公式1.1是一个非凸的优化问题,无法直接求解。为解决这个问题,学者们提出了一种连续优化方法口: 基于迹指数和增广拉格朗日的非组合优化结构学习( Non-combinatorial Optimization via TraceExponential and Augmented lagRangian for Structure learning,NOTEARS)。该方法采用数值解法,将 DAG 学习问题转化为约束的数值优化问题,下面我们将介绍该方法。
模型构造
假设数据 D∈Rn×N包含 n 个独立同分布的观测样本,其中每个观测样本由N个变量组成,即 V{V1,..,VN},而数据对应的总体分布为 P(V)。结构学习的任务是从所有结构中找出服从数据分布 P(V)的结构。 连续优化方法引入结构等式模型 ( Structural Equation ModelSEM)的概念,以描述变量之间的关联及相互作用。形式上,SEM 由两个部分变量组成:
Vj=AjTV−j+Uj(2.1)
V−j表示节点集合中除去Vj的所有节点,Uj表示偏置。至于这个表示方式一般使用权重邻接矩阵的方式,也就是Aij表示邻接矩阵A中,i节点和j节点之间的权重。通过矩阵的表达, 简化了计算的方式。
Vj=AjTV+Uj(2.2)
这里的V表示为矩阵的除了Vj以外的行向量,而AjT表示权重。很明显这里有一个可优化的方程。
l(A,D)=∣2n1(D−DA)∣2(2.3)
也就是真实值与其他的特征与权重的乘积的差别,这就是一种损失函数。其实就是最小二乘法的损失函数,如果将这个最小二乘法损失降低到最小,那么我们就获得了真实的因果结构。此外对于一个回归性问题,G的分布应该是稀疏的,要加入一个稀疏正则项,从而得到最后的损失函数为
F(A)=l(A;D)+λ∣∣A∣∣=2n1∣D−DA∣2+λ∣∣A∣∣(2.4)
这个时候优化方程就变成了如下的样子
min F(A)s.t.G(A)∈DAGs(2.5)
很明显接下来就要解决的问题就是无环的约束问题啦, 怎么能通过量化的方式表达呢?
无环的约束方法
我们先来许愿, 希望这个无环的判断长成什么样子呢? 我先来许愿
- 有一个函数h(A)=0,就表示无环,也就是h(A)越大也能表示环越多。
- 函数h的光滑的
- 导数是便于计算的
这里咱们直接给一个定理,如果B=A⊙A,A是权重矩阵,对应图的G位有向无环图,当且仅当h(A)=tr(eB)−N=0, 其中⊙表示哈达码积,eB表示矩阵指数,tr表示矩阵的迹,并且有
tr(eB)=tr(I)+tr(B)+tr(2!B2)+tr(3!B3)(2.6)
可以进一步看上面这个公式2.6。tr(I)=N永远成立,也就是tr(B)=0才能保证上面的公式成立,这里有个小推论,矩阵中有长度为l的环必然有导致Bl的迹。
有了上面这个定理。公式2.5进一步可落地啦。
min F(A)s.t.h(A)=0(2.7)
上面这个运筹方程的求解可以使用增广拉格朗日方法进行求解,使用对偶函数近似最优解。但是这一些都是基于线性的假设。
增广拉格朗日方法在原损失函数F(A)的基础上添加上h(A)的二次惩罚项,ρ表示惩罚系数,转化为如下的问题
Dual(α)=minA∈RN×NLρ(A,α)Lρ(A,α)=F(A)+2ρ∣h(A)∣2+αh(A)(2.8)
神经网络进行DAG学习
如果变量之间存在非线性关系,显然这是一个基础假设的崩塌,那么如何解决非线性的问题呢?
第一反应应该是神经网络类的方法,是的,神经网络在结构复杂到一定程度下能拟合任何的函数形式。那我们新的范式表达也十分简单。
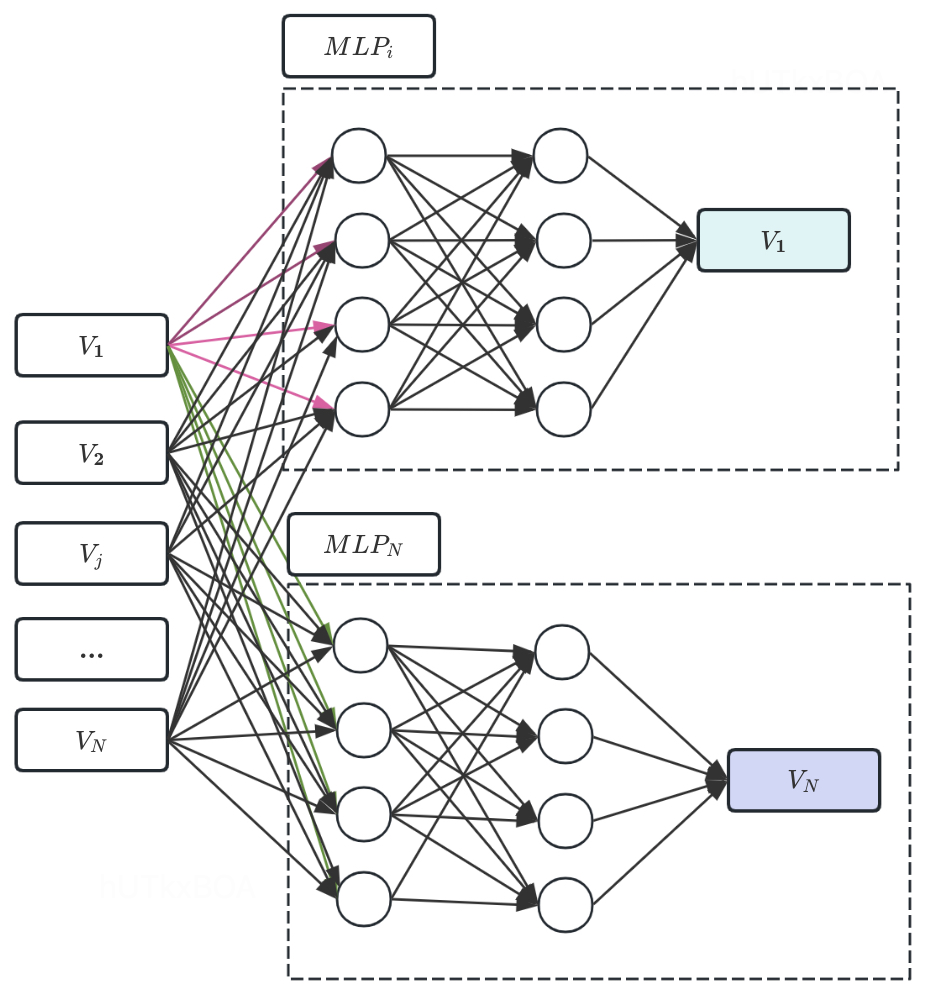
Vj=MLPj(V−j,θ)(2.9)
这里需要注意一下,我们实际上是为每个Vj都有一个神经网络。也就是我们有多个MLP。整体结构如下图所示。
邻接矩阵表达
这里还要解决一个问题,有了神经网络网络的协助,最后图的结构还是需要一个邻接矩阵的表达,已经融入和神经网络中的参数,怎么表达邻接矩阵的关系呢?可以试想一些神经网络的传播过程,如果MLPj表示Vj变量的生成网络, 如果参数的矩阵的第k列都是0,表达什么含义呢?说明Vk这个变量无法传递到下一层,是不是说明Vj和Vk是独立的,且没有边关系。这里公式2.8就可以通过神经网路的方式进行表示。
minθ(n1j∑N(l(Vj,MLPj(V−j,θj))+λ∣Wj∣)+2ρ∣h(A(θ))∣2+α∣h(A(θ))∣)(2.10)
进一步给迭代的规则
θk=argminLρk(θ,αk)αk+1=αk+ρkh(Ak)ρk+1=ηρk if∣h(Ak)∣>γ∣h(Ak−1)∣ρk+1=ρk
可见F(A)可以通过神经网络拟合,通过神经网路的学习,从生成模型中提取出邻接矩阵,在进行阈值的筛选就可以得到对应的有向无环图。
DAG-GNN
之前的方式是通过MLP当时学习DAG,接下来的这一个章节学习的是通过GNN学习权重邻接矩阵,并将DAG的学习问题转化为无环约束的数字优化问题。
问题转化
首先还是使用结构等式框架(SEM)为基础,回顾线性表达,D为数据样本矩阵,U是噪声矩阵,A是邻接矩阵。
D=ATD+U(3.1)
D−ATD=UD(I−AT)=U
为了得到D,对上式取逆是因为 𝐴是一个严格上三角矩阵,保证了 (I−AT)的特征值都不为零,我们可以两边同时乘以(I−AT)−1
D=U(I−AT)−1U
当时数据对应的变量中所有的变量按照拓扑排序的方式,这权重矩阵A是一个严格上三角矩阵
D=(I−AT)−1U(3.2)
进一步可以表示为D=fA(U),以U为输入,返回D为输出的图神经网络的形式
D=f2((I−AT)−1f1(U))(3.3)
公式3.3中,f1,f2表示参数函数,可以分别对D和U进行线性和非线性转换。公式3.3可以看做是一个解码器,学习DAG的任务变成了优化D的生成模型和学习权重邻接矩阵A的问题。
这个时候如果给定样本D和U的分布形式(高斯分布但是均值和方差未知),希望通过公式3.3得到D的生成模型,并通过优化生成模型得到邻接矩阵A。这个时候可以通过最大似然的方式求得D的分布形式。 也就是最大化log p(D),也就是最大化D的概率。因为还有U的参数,所以是最大化如下的公式表达。
n1k=1∑nlogp(Dk)=n1k=1∑n∫p(Dk∣U)p(U)dU(3.4)
这个时候发现上面的公式很难计算,这个可以采用变分编码器(VAE)的方式拟合生成机制,进而获得一个接近真实分布的变分后验。
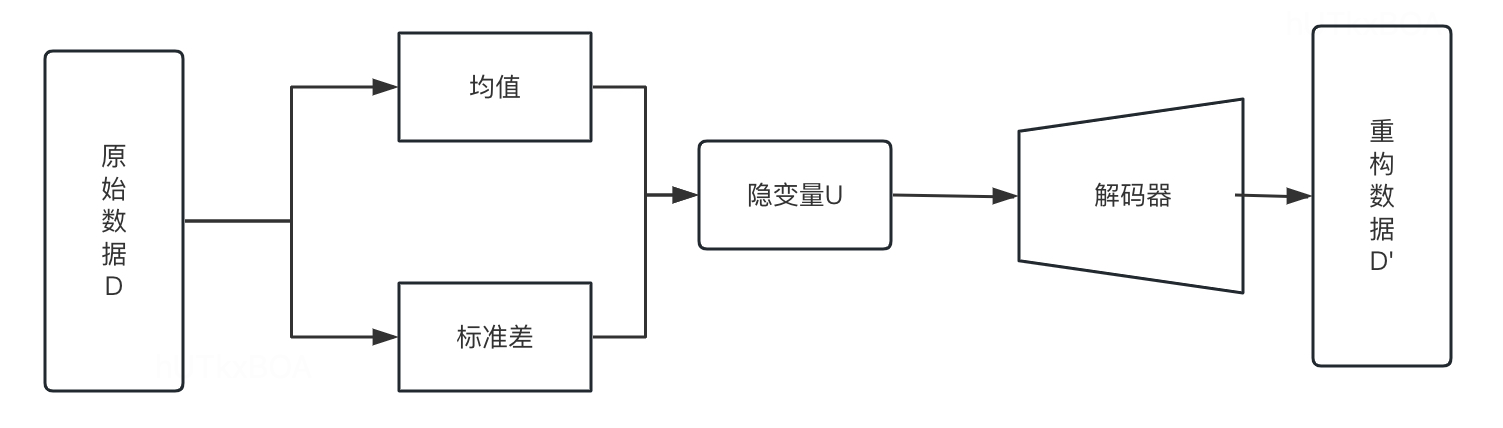
如上图所示,变分解码器将输入的数据用解码器压缩到低维空间,其做法是将原始数据D经过编码器得到因变量U的分布所需的各项元素,得到因变量U,然后得到重构数据D‘。
在使用VAE的时候,给定一个样本Dk,编码器将其编码成q(U∣Dk)的隐变量U,然后经过解码器从U从重构出来p(Dk∣U)的Dk,则编码器表示为如下形式(对应公式3.3)
U=f4((I−AT)f3(D))(3.5)
解码器表示为
D=f2((I−AT)−1f1(D))(3.6)
令f3为MLP,而f4表示恒等映射,f2为MLP,f1表示恒等映射,如下图所示
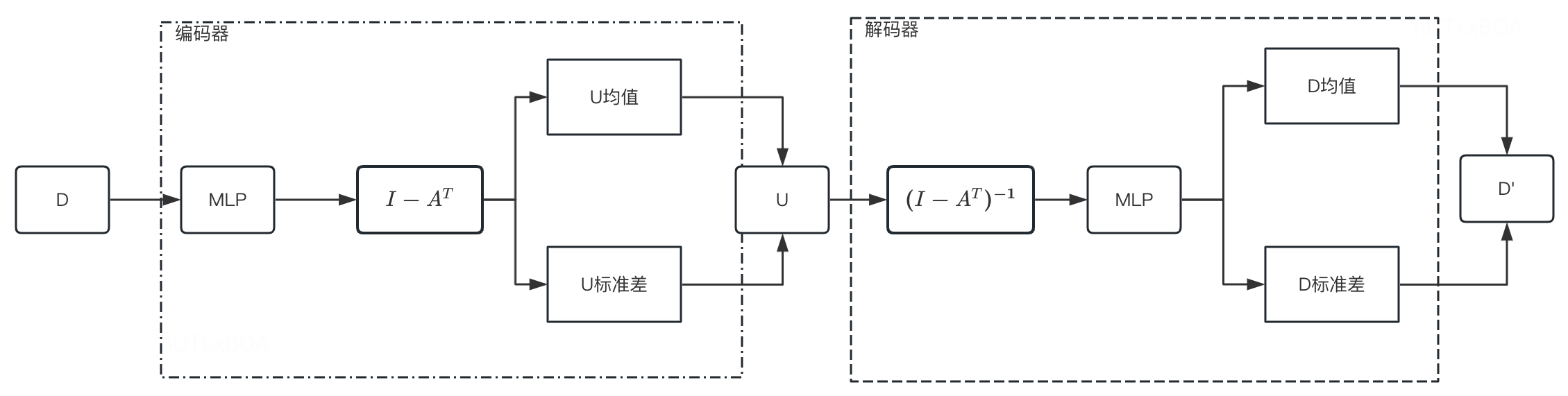
上图的神经网络可以形式化如下的方式
[U均值∣U标准差]=(I−AT)MLP(D,W1,W2)MLP(D,W1,W2)=relu(DW1)W2[D均值∣D标准差]=MLP((I−AT)−1U,W3,W4)
这里还需进一步进入一个无环约束定理,
令A∈RN×N为一个有向图对应的邻接矩阵,对任意的α>0,该有向无环图当且仅当如下的条件成立
tr[(I+αA∘A)N]−N=0(3.7)
从而根据重构损失和无环约束就可以表示为如下的表达式
minA,θ f(A,θ)s.t.h(A)=tr[(I+αA∘A)N]−N=0(3.8)
问题中未知的包括邻接矩阵A,θ=[W1,W2,W3,W4],进一步使用增广矩阵的方式
L(A,θ)=f(A,θ)+αh(A)+2ρ∣h(A)∣2(3.9)
类似的更新公式
(Ak,θ)=argminL(A,θ)αk+1=αk+ρkh(Ak)ρk+1=ηρk if∣h(Ak)∣>γ∣h(Ak−1)∣ρk+1=ρk(3.10)
优化完成后就可以得到权重矩阵A和相应的有向无环图。因为使用神经网络重构数据切显示的定义了邻接矩阵,所以此处就要更新矩阵权重,又要更新神经网络参数。
总而言之
上面介绍了一些新的方法进行DAG的学习,当然还有些方式也能起到类似的学习下效果,例如基于对抗网络的因果结构学习SAM,如果感兴趣可以查阅相关的资料。